


目次
記事の要約
- ダイナミックマッププラットフォーム社が内閣府BRIDGEプログラムの研究開発事業を受託
- 公共エリア向け高精度3次元地図(HDマップ)とダイナミックマップを開発
- 2026年度からの社会実装および国内外展開を目指す
ダイナミックマッププラットフォーム社、内閣府BRIDGEプログラム研究開発事業を受託
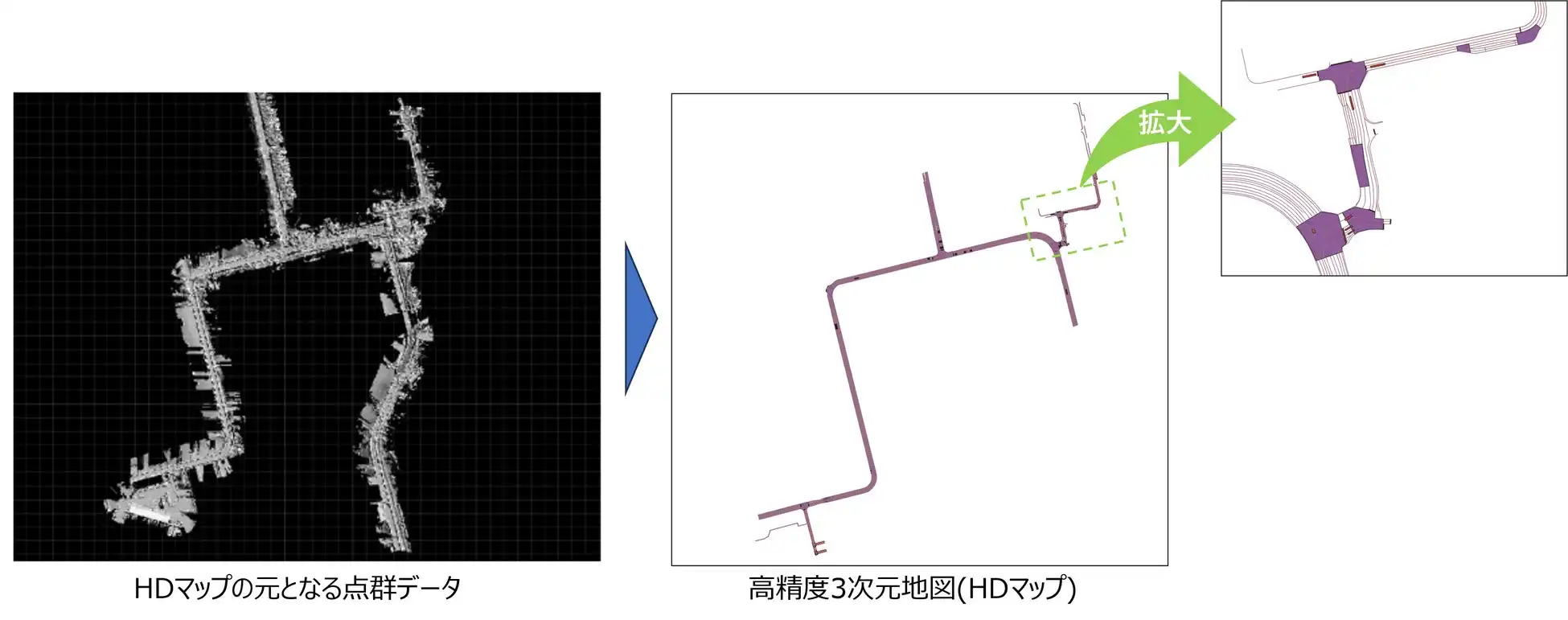
ダイナミックマッププラットフォーム株式会社は2025年5月15日、内閣府の「研究開発成果とsociety 5.0との橋渡しプログラム」(BRIDGE)の2025年度研究開発事業を受託したと発表した。この事業は、経済産業省による「公共エリア向けダイナミックマップの開発」であり、空港や港湾といった公共エリアに対応した高精度3次元地図(HDマップ)とダイナミックマップを構築するものである。
本事業は、自動運転の社会実装を加速するための基盤インフラ整備を目的としている。2024年度までに公共エリア向けHDマップの仕様やダイナミックマップの構成を策定し、HDマップを搭載した自動運転車両による実証実験を実施済みだ。2025年度は、AI技術による現場状況とHDマップ情報の統合、持ち込み可能な機材データのみでの地図情報維持プロセスの構築、自動運転車両を用いた空港や港湾での実証実験の3つの技術課題に取り組む。
2023年度から本事業を受託しており、その成果を基に継続して実施する。2026年度からの社会実装および国内外への展開を見据えた最終段階へと移行する予定だ。得られた成果は公道における自動運転にも展開していくことを目指している。
事業概要と成果
| 項目 | 詳細 |
|---|---|
| 事業名 | 公共エリア向けダイナミックマップの開発 |
| 受託者 | ダイナミックマッププラットフォーム株式会社 |
| 事業期間 | 2023年度~2026年度(予定) |
| 事業内容 | 公共エリア向け高精度3次元地図(HDマップ)とダイナミックマップの開発、実証実験 |
| 対象エリア | 空港、港湾などの公共エリア |
| 目標 | 2026年度からの社会実装および国内外展開 |
| 2024年度成果 | HDマップ仕様策定、地図属性情報の高度化、ダイナミックマップ構成策定、効率的な地図更新技術確立、中部国際空港セントレアでの実証実験実施 |
| 2025年度取り組み | AI技術による現場状況とHDマップ情報の統合、持ち込み可能な機材データのみでの地図情報維持プロセスの構築、自動運転車両を用いた空港や港湾での実証実験 |
ダイナミックマップについて
ダイナミックマップは、静的な情報を持つHDマップに準動的/動的な情報を結び付けた次世代の地図インフラである。リアルタイム性ごとに4階層に分類された情報を持つ地図データベースの概念を指す。
- 静的情報:車線情報、路面情報など
- 準静的情報:一時的な工事情報など
- 動的情報:車両の位置情報、通行人の情報など
本事業では、このダイナミックマップ技術を活用し、公共エリアにおける自動運転の安全性を高め、効率的な運用を実現することを目指している。
公共エリア向け自動運転技術に関する考察
本事業は、深刻な労働力不足に悩む空港や港湾における自動運転技術の社会実装に大きく貢献するだろう。高精度な地図情報とリアルタイムな状況把握により、安全で効率的な自動運転を実現できる可能性がある。しかし、想定外の状況への対応や、システムの信頼性確保、プライバシー保護といった課題も残るだろう。
起こりうる問題への対策としては、様々なシミュレーションによるテストや、異常検知システムの導入、データの匿名化などが考えられる。さらに、より詳細な地図情報や、様々なセンサーデータの統合、AIによる予測機能の向上などが求められるだろう。将来的には、本事業で得られた技術や知見が、公道での自動運転やその他の分野にも応用されることが期待される。
今後、より高度なAI技術やセンサー技術の進化、そして、関係各機関との連携強化によって、より安全で信頼性の高い自動運転システムが実現すると期待できる。国際標準化への取り組みも重要であり、日本発の技術が世界をリードする可能性を秘めている。
参考サイト/関連サイト
- PR TIMES.「内閣府の課題解決プログラム「BRIDGE」の2025年度研究開発事業を受託 ~公共エリアにおける自動運転の社会実装へ向けて次世代ダイナミックマップの開発を加速~ | ダイナミックマッププラットフォーム株式会社のプレスリリース」.https://prtimes.jp/main/html/rd/p/000000102.000063188.html, (参照 2025-05-15).
