


目次
記事の要約
- HatsuMuvがロボットハンド「HatsuHand」に力覚センサーを組み込み実験
- ミネベアミツミ製6軸力覚センサー「MMS101」のHatsuHandへの適合性を確認
- 実験結果をYouTubeで公開、研究用途への応用が期待される
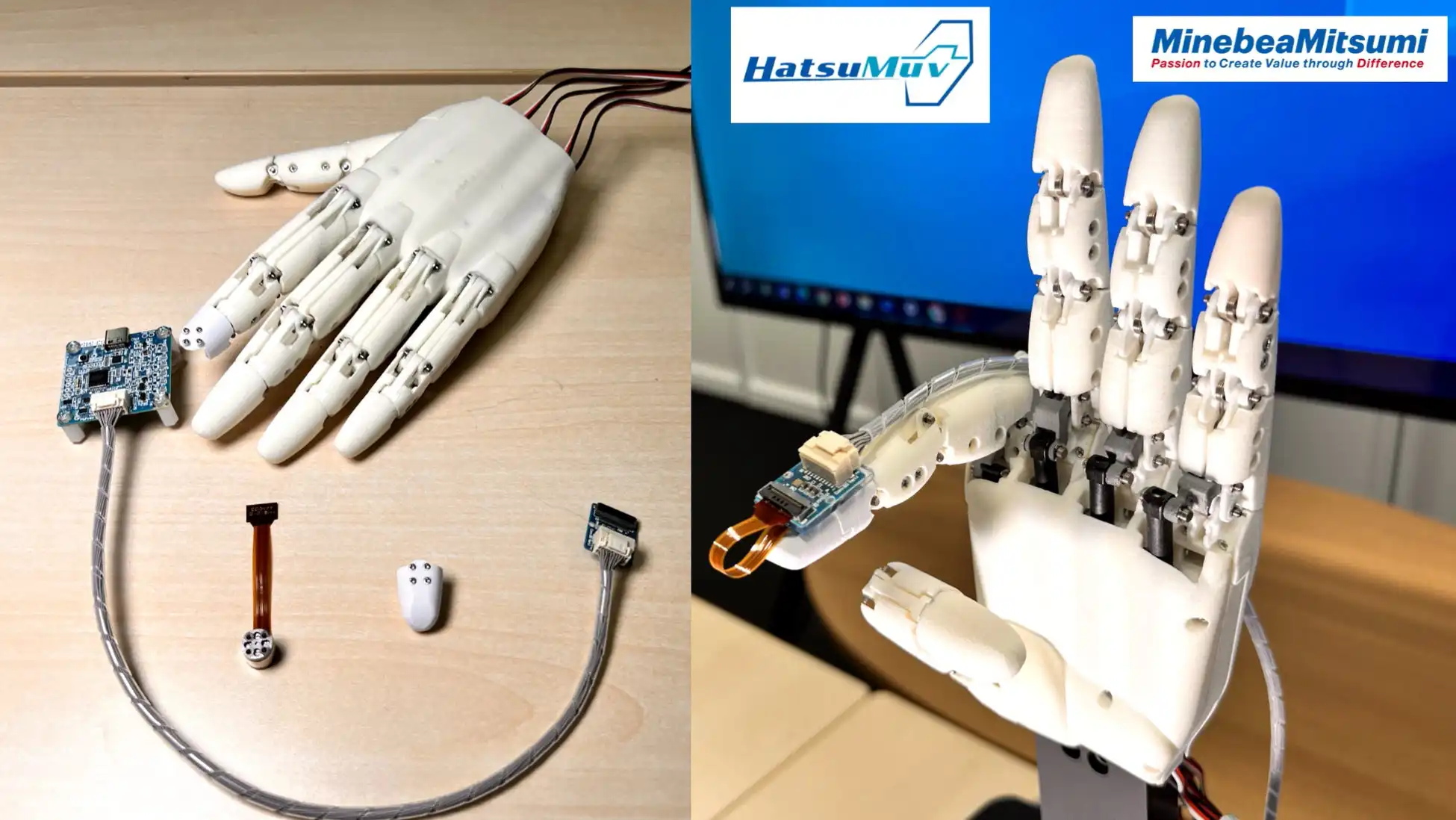
HatsuMuv、小型6軸力覚センサー搭載ロボットハンド「HatsuHand」の実験結果を発表
株式会社HatsuMuvは2025年5月7日、ロボットハンド「HatsuHand」にミネベアミツミ株式会社製の小型6軸力覚センサー「MMS101」を組み込み、実験を実施したことを発表した。この実験では、MMS101センサーをHatsuHandの人差し指に組み込み、センサーの取り付けと動作を詳細にテストしたのだ。
複数の把持・接触ケースでHatsuHandの動作をテストし、力覚センサーの反応を評価用アプリ「ForceSensorEvaluationProgram」でリアルタイムにモニター表示した。力に応じた変化をMMS101センサーが正確に測定し、その測定結果はモニターに可視化された。これにより、センサーの精度とHatsuHandとの適合性が確認できたのだ。
HatsuHand専用指先のSTEPファイル(3D CADデータ)はGitHubで無料で公開されている。実験の詳細はYouTubeで公開されている実験動画で確認できる。今回の実験結果により、MMS101センサーがHatsuHandに対応可能であることが確認され、今後、研究用途への応用が期待されている。
HatsuMuvは、2025年5月8日・9日に東京ビッグサイトで開催される「Startup JAPAN 2025」に出展する予定だ。ロボットハンド「HatsuHand」も展示される予定である。
実験概要と公開情報
| 項目 | 詳細 |
|---|---|
| 発表日 | 2025年5月7日 |
| 企業名 | 株式会社HatsuMuv |
| 製品名 | ロボットハンド HatsuHand |
| センサー名 | ミネベアミツミ MMS101 |
| 実験内容 | センサーの組み込みと動作テスト |
| 公開情報 | 実験動画(YouTube)、STEPファイル(GitHub) |
| 展示会 | Startup JAPAN 2025 (2025年5月8日・9日) |
6軸力覚センサーについて
6軸力覚センサーとは、物体の力とモーメントを6方向(X軸、Y軸、Z軸方向の力と、それら3軸周りのモーメント)で検出するセンサーである。このセンサーは、ロボットハンドなどの精密な制御に必要となる、繊細な力の変化を検知する能力を持つ。
- 力の大きさ、方向を検出
- ロボットハンドの精密制御に貢献
- 様々な研究用途への応用が可能
特にロボットハンドにおいては、物体の把持や操作の精度向上に大きく貢献する。繊細な作業や、力の加減が必要な作業を正確に行うことが可能になるのだ。
HatsuHandとMMS101センサー実験に関する考察
HatsuMuvによるHatsuHandとMMS101センサーの実験は、ロボットハンドの高度化に大きく貢献する成果であった。力覚センサーの搭載により、HatsuHandはより精密で繊細な操作が可能になり、研究用途での活用範囲が大幅に広がるだろう。しかし、センサーの耐久性や、様々な物体への対応性など、今後の課題も残されている。
考えられる解決策としては、より耐久性の高いセンサーの採用や、多様な物体の形状や材質に対応できるアルゴリズムの開発が挙げられる。また、センサーデータのリアルタイム処理能力の向上も重要となるだろう。将来的には、AIによる学習機能を組み込み、より高度な把持制御を実現することが期待される。
今後、より多様なセンサーとの連携や、AIによる高度な制御技術の導入によって、HatsuHandの機能はさらに進化していくと予想される。その進化によって、医療、製造、サービスなど、様々な分野での革新的な応用が期待できるのだ。
参考サイト/関連サイト
- PR TIMES.「HatsuMuv、ミネベアミツミ製小型6軸力覚センサーをHatsuHandに組み込み、実験を実施! | 株式会社HatsuMuvのプレスリリース」.https://prtimes.jp/main/html/rd/p/000000007.000127494.html, (参照 2025-05-08).
