


目次
記事の要約
- NTT東日本らが遠隔収穫ロボット操作に成功
- 秋田と東京間約400km離れた場所からイチゴ収穫
- エッジコンピューティングによる品質制御で高精度を実現
2025年5月12日、遠隔収穫ロボット操作実験成功をNTT東日本が発表
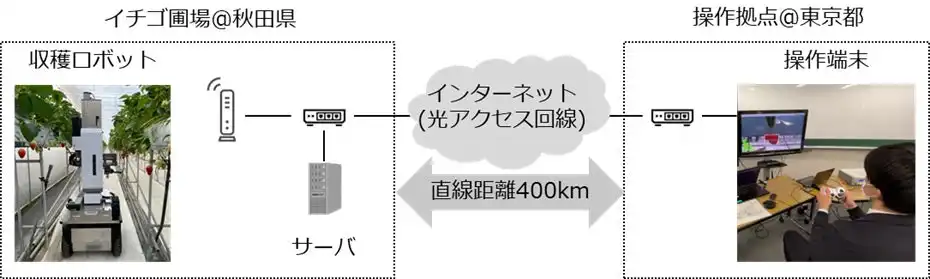
東日本電信電話株式会社は2025年5月12日、東京都の操作者による秋田県圃場でのイチゴ収穫ロボットの遠隔操作実験に成功したと発表した。この実験では、約400km離れた場所から、画像処理による収穫適否判定付き映像を見ながらロボットを操作し、イチゴを傷つけることなく収穫できたのだ。
通信品質の変動にも高い操作性を維持し、ロボットを精度高く制御できた点が大きな成果である。この技術は、農業における人手不足解消に大きく貢献するだろう。スマート農業の促進に繋がる画期的な技術として注目を集めている。
NTT東日本、NTT、NTTアグリテクノロジーの3社が共同で実施したこの実証実験は、ネットワークとサーバが連携したエッジコンピューティングの品質制御技術が鍵となっている。この技術により、高度なイチゴ収穫動作でも遠隔操作が可能となり、ユーザビリティの高いスマート農業の実現に繋がると期待されている。
遠隔収穫システム概要と成果
| 項目 | 詳細 |
|---|---|
| 実験実施日 | 2025年5月12日 |
| 操作者所在地 | 東京都 |
| ロボット設置場所 | 秋田県 |
| 距離 | 約400km |
| 通信環境 | 光アクセス回線とインターネット回線 |
| 成功率(遅延対策前) | 約50% |
| 成功率(遅延対策後) | 約80% |
| 評価 | 5名全員が操作性の改善を実感 |
エッジコンピューティングによる品質制御
本実証実験では、エッジコンピューティングによる品質制御が重要な役割を果たしている。ネットワークコンピュート高速クローズドループ制御技術の高度化により、通信品質の変動にも対応できるシステムが実現したのだ。
- アプリ外からの処理時間計測が可能
- 通信品質を3段階に分類し、システムに通知
- 通信品質に応じたロボットアームの速度制御
これにより、遠隔操作における遅延の影響を最小限に抑え、安定した操作性を確保することが可能になった。この技術は、農業分野のみならず、様々な遠隔操作システムへの応用が期待される。
遠隔収穫ロボット操作実験に関する考察
本実証実験は、遠隔操作によるスマート農業の可能性を大きく示すものだ。通信遅延などの課題をエッジコンピューティング技術で克服し、実用レベルの高い遠隔操作を実現した点は高く評価できる。しかし、大規模な圃場への展開や、様々な種類の作物への適用には、さらなる技術開発が必要となるだろう。
今後起こりうる問題としては、悪天候や通信障害によるシステム停止、ロボットの故障などが考えられる。これらの問題への対策として、冗長化システムの構築や、遠隔監視・メンテナンス体制の強化が重要となるだろう。また、より多様な作物に対応できるよう、AIによる画像認識技術の精度向上も必要だ。
将来的には、複数のロボットを同時に制御できるシステムや、収穫作業以外の農作業にも適用できるシステムの開発が期待される。さらに、農家の負担軽減だけでなく、労働生産性の向上や、食料生産の安定化にも貢献できる技術へと発展していくことを期待したい。
参考サイト/関連サイト
- PR TIMES.「エッジコンピューティングの品質制御による遠隔収穫ロボット操作に成功 | 東日本電信電話株式会社のプレスリリース」.https://prtimes.jp/main/html/rd/p/000001161.000098811.html, (参照 2025-05-14).
